ロボット工学のためのChatGPT:設計原則とモデル化能力
Microsoft Autonomous Systems and Robotics Research Groupのメンバーは、ChatGPTを基盤とした言語に基づく、ロボット工学のための新たなパラダイムを導入しています。最近発表された論文「 ChatGPT for Robotics 」では、ChatGPTをロボット工学のタスク解決に導くための一連の設計原則について解説しています。
彼らはChatGPTの機能をロボット工学に拡張し、 myCobot 280ロボットアーム、ドローン、ホームアシスタントロボットなどの複数のプラットフォームを言語で直感的に制御しました。
ChatGPT - ロボット操作
このビデオでは、ChatGPTをロボット操作タスクに使用した結果を概説しています。目標位置への移動、グリッパーのオン/オフといった基本機能を含む、操作のための高水準関数ライブラリを定義しています。
プロンプトに十分なコンテキストがあり、これらの機能にアクセスできるため、ChatGPT ではピックアンドプレース、スタッキング、ブロック配置などのタスクをすばやく実行できることがわかります。
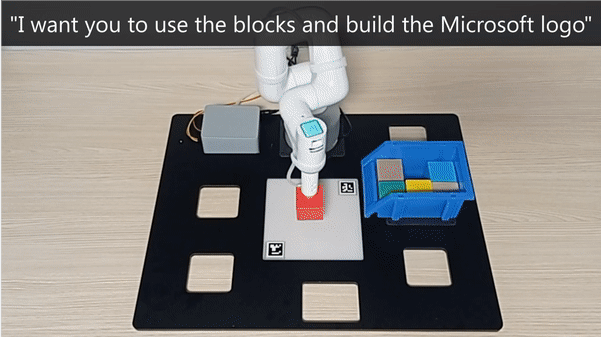
次に、ChatGPT にこれまで学習したスキルを使用して、ブロック配置というより複雑なタスクを実行するように要求します。
これは、ChatGPT がより単純な関数で構成された高レベルの動作プリミティブを構築し、学習したスキルを論理的に連鎖させてより複雑な問題を解決する能力を強調しています。