
M5版ロボットアームは、Elephant RoboticsとShenzhen Mingzhan Technology Co., Ltd.(M5STACK)が共同で開発しました。myCobotシリーズ初の販売用ロボットアームです。コアプロセッサとしてEsp32を採用し、2つのディスプレイと複数の物理ボタンを搭載することで、テーブルサイズの床でも操作可能です。M5エコシステムと緊密に統合されており、ユーザーは公式ウェブサイトに掲載されているチュートリアルに沿って、UIFlow、Python、Arduinoを介してロボットを制御できます。
M5 バージョン ロボット アームには 2 つの画面と複数の物理ボタンが装備されており、M5Stack-basic は台座上のメイン コントロールとして機能し、M5STACK Atom は端のセカンダリ コントロールとして機能します。
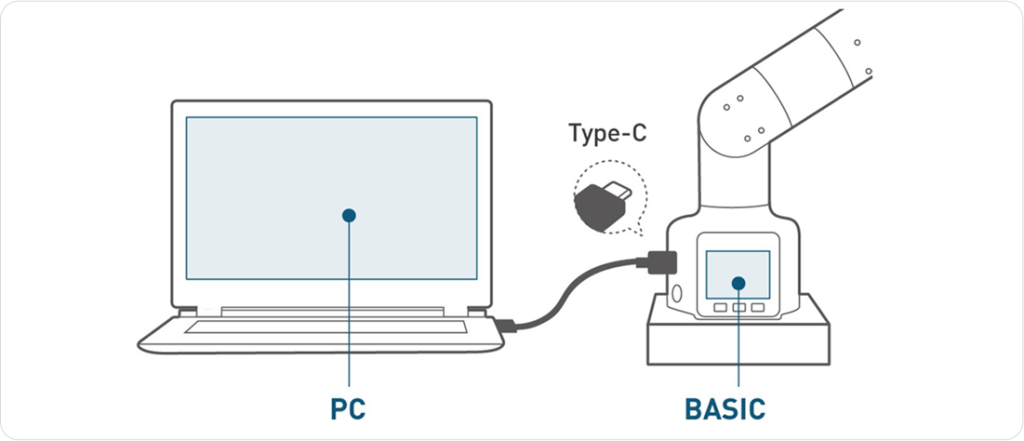
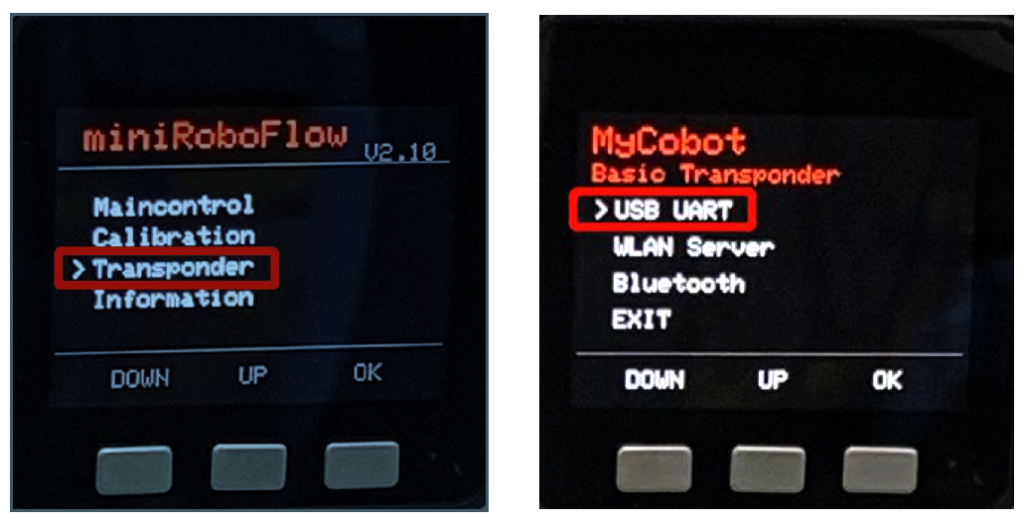
M5版ロボットアーム自体には**記録と再生**機能(つまり、動作の記録と再生)のみが搭載されています。UIFlow、Python、Arduinoなどを使用して開発を進める場合は、PCまたはノートパソコンに接続する必要があります。接続方法は以下の通りです。


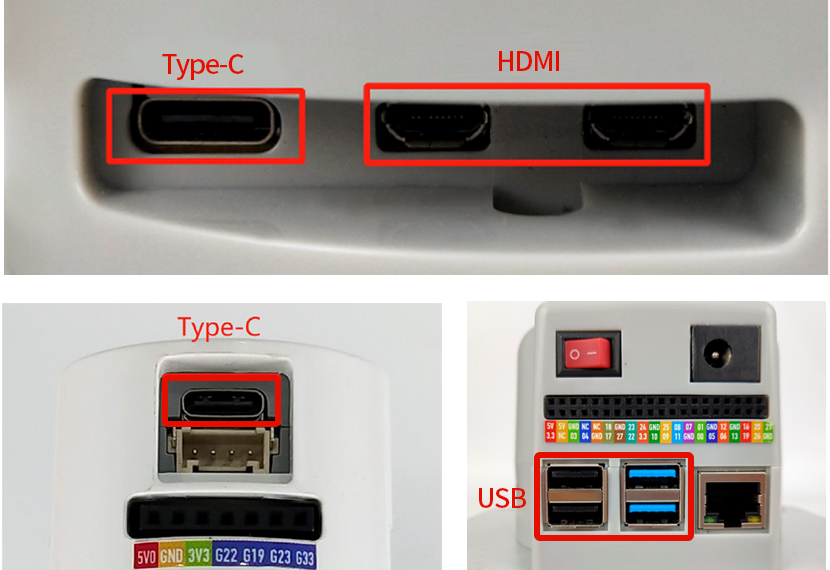
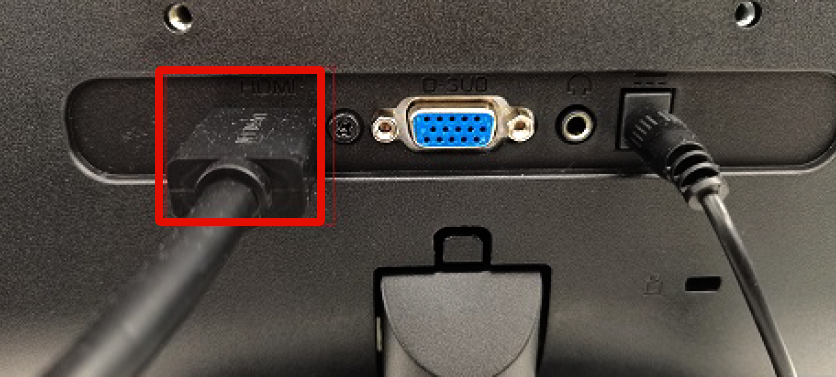
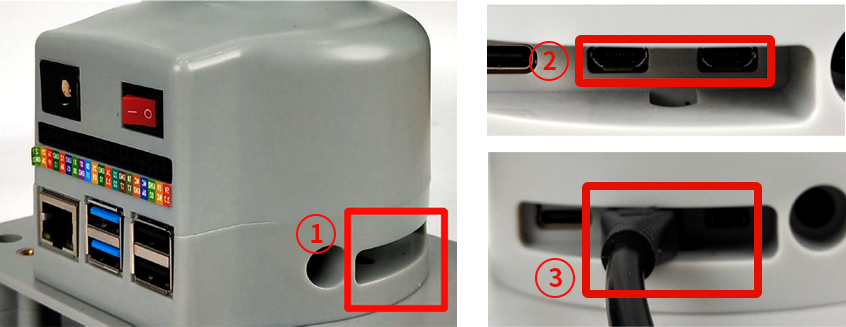
PI版ロボットアームは、Elephant RoboticsとRaspberry Piの共同開発製品です。Raspberry PI 4Bをコアプロセッサとして採用し、Raspberry PI 4Bのオリジナルハードウェアインターフェースを継承することで、Linuxシステムのアプリケーションニーズを満たすオールインワン構造を実現し、ポータブルロボット開発に最適です。Ubuntu 18.04システムに加え、Python、ROS、myBlocklyなどの開発環境も搭載しているため、PCを介さずにディスプレイに接続して開発できます。
PI バージョン ロボット アームには、Raspberry PI 4B、1.5GHz 4 コア マイクロプロセッサが組み込まれており、Debian/Ubuntu プラットフォームを実行し、4 つの USB チャネル、2 つの HDMI チャネル、標準化された GPIO インターフェイスをサポートし、TF カードは取り外し可能です。PI バージョン ロボット アームの本質は、独立したシステムを備えた開発ボードであり、小型のコンピュータ ホストとして考えることができます。
ホストとホスト間の通信は、単純に有線で構成することはできません。独立したモニターに接続し、電源、マウス、キーボードを備え、開発ボードの内蔵システムにアクセスして開発・操作するだけで済みます。