

All-in-One-Design
Das All-in-One-Design ermöglicht eine optimale Nutzung des Arbeitsbereichs und die perfekte Integration in die Produktionsumgebung. Die auf einem präzisen dynamischen Modell basierende Antikollisionserkennungsfunktion gewährleistet eine reibungslose Zusammenarbeit mit dem Menschen.

Parameter
Sechs Freiheitsgrade der Gelenkbewegung, ein Bewegungsradius von 450 mm und eine Nutzlast von 1 kg tragen dazu bei, Ihr ideales Anwendungsszenario zu erreichen.

myStudio Pro

Praktische Lehre
Python

C++

ROS
Pavillon
Netzwerkanschluss

RS485
Buchse
SPS
SSH
DÜRFEN
Vollständig offene Steuerungsschnittstelle
Das Gerät bietet umfassende Hardware-Konnektivität, darunter EtherNet/IP-, RS485- und 24-V-I/O-Schnittstellen. Diese Multi-Protokoll-Unterstützung ermöglicht die durchgängige Entwicklung von Roboteranwendungen.


Hervorragende Konfiguration
Optimieren Sie Ihre periphere Steuerung in verschiedenen Szenarien und setzen Sie Ihre Ideen in die Realität um.

myStudio Pro
Hierbei handelt es sich um eine umfassende Roboterprogrammierungs- und Steuerungssoftware mit Funktionen wie visueller Programmierschnittstelle, schneller Bewegungssteuerung, Drag-and-Teach-Funktion und Konfigurationsmöglichkeiten zur Abfrage des Roboterstatus. Sie unterstützt verschiedene Verbindungstypen, darunter Modbus und Socket, um die Programmierung und schnelle Anwendung von Robotern für Anwender zu vereinfachen.

Unterstützung für Simulationssysteme
Es unterstützt ROS2-Simulationsumgebungen und stellt Open-Source-Treiberdateien für die Robotersteuerung bereit. Das System umfasst grundlegende Anwendungsfälle für RVIZ und MoveIt und ermöglicht so die individuelle Integration für verschiedene Anwendungen. Zusätzlich bietet es 3D-Robotermodelle und URDF-Dateien, wodurch die Anbindung an umfassendere Simulationssysteme erleichtert wird.

Anwendungsszenarien
Die drei wichtigsten Anwendungsszenarien für personalisierte Roboter umfassen: visuelles 3D-Sortieren, Roboterschreiben und -malen sowie die mobile Inspektion komplexer Robotersysteme. Das System bietet Unterstützung bei der Produktintegration und deckt eine Vielzahl von Peripheriegeräten wie 3D-Kameras, Erkennungssoftware, Erkennungsalgorithmen, Aktoren, Industrie-PCs und fahrerlose Transportsysteme (AGVs) ab, um den individuellen Anwendungsanforderungen verschiedener Nutzer gerecht zu werden.
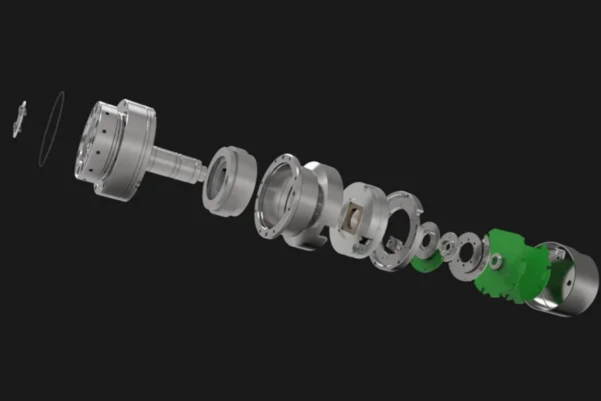
Sicheres selbstverriegelndes Harmonic Joint Modul
Das integrierte Modul vereint Harmonic-Drive-Getriebe, Servomotoren, Gelenkbremsen und Steuerungen. Es verfügt über eine sofortige Selbstverriegelung bei Stromausfall – dies gewährleistet Betriebssicherheit und Zuverlässigkeit und erhöht gleichzeitig die Sicherheit der Mensch-Roboter-Kollaboration.

Präzise Handwerkskunst, robuste Zuverlässigkeit
Mit einem Ganzmetall-Unibody-Hochtemperaturgehäuse
Durch die Verwendung eines Druckgussrahmens mit gleichmäßiger struktureller Festigkeit und integrierten Steuerungen entfallen bei dieser Konstruktion externe Schaltschränke und komplexe Verkabelungen – und es wird eine schlanke, effiziente Lösung geboten.
Get a Quotation Now!
Get the best price and more details on the new arrival, AGV Pro by emailing us today!