
Die Roboterarme der M5-Version werden gemeinsam von Elephant Robotics und Shenzhen Mingzhan Technology Co., Ltd. (M5STACK) hergestellt. Es handelt sich um den ersten Roboterarm der myCobot-Serie, der zum Verkauf angeboten wird. Er nutzt einen ESP32-Kernprozessor und verfügt über zwei Bildschirme und mehrere physische Tasten, sodass er auf einer tischgroßen Fläche eingesetzt werden kann. Dank der Integration in das M5-Ökosystem können Benutzer Roboter über UIFlow, Python und Arduino gemäß dem Tutorial auf unserer offiziellen Website steuern.
Roboterarme der M5-Version sind mit zwei Bildschirmen und mehreren physischen Tasten ausgestattet. M5Stack-basic fungiert als Hauptsteuerung auf dem Sockel und M5STACK Atom fungiert als sekundäre Steuerung am Ende.
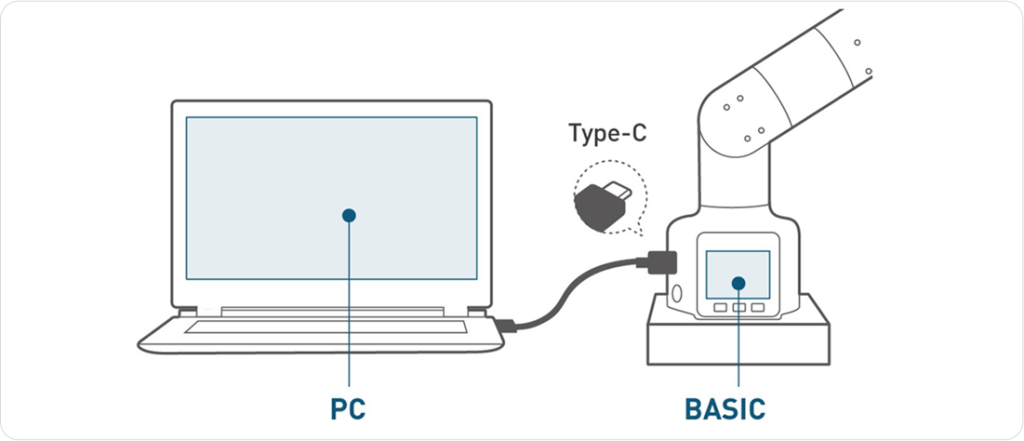
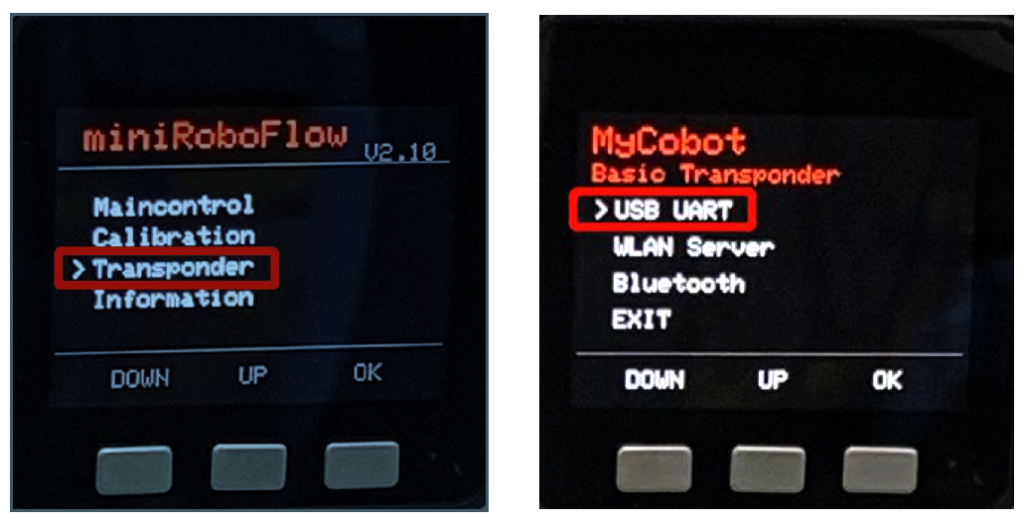
Roboterarme der M5-Version selbst verfügen nur über die Funktion ** Aufnahme und Wiedergabe **, d. h., sie können Aktionen aufnehmen und wiedergeben. Wenn Sie UIFlow, Python oder Arduino für die weitere Entwicklung benötigen, müssen Sie eine Verbindung zu einem PC oder Laptop herstellen. Die Verbindungsmethoden sind wie folgt:


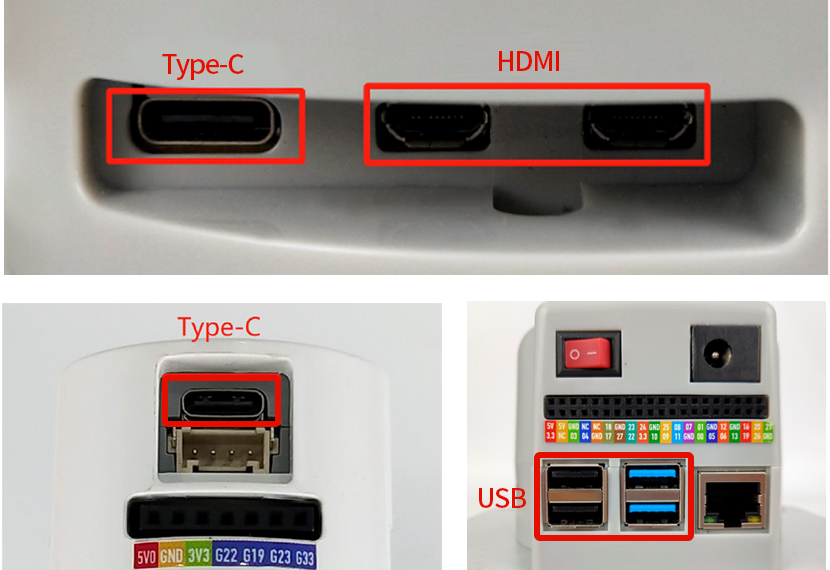
Die Roboterarme der PI-Version sind ein Gemeinschaftsprodukt von Elephant Robotics und Raspberry Pi. Mit dem Raspberry PI 4B als Kernprozessor und der ursprünglichen Hardwareschnittstelle des Raspberry PI 4B erfüllt der Roboterarm die Anwendungsanforderungen von Linux-Systemen mit einer einheitlichen Struktur für die Entwicklung tragbarer Roboter. Dank integriertem Ubuntu 18.04 sowie Entwicklungsumgebungen wie Python, ROS und myBlockly kann er nach der Verbindung mit einem Display ohne PC entwickelt werden.
In die Roboterarme der PI-Version ist Raspberry PI 4B integriert, ein 1,5 GHz 4-Core-Mikroprozessor, der auf der Debian/Ubuntu-Plattform läuft, 4 USB-Kanäle und 2 HDMI-Kanäle unterstützt und eine standardisierte GPIO-Schnittstelle besitzt. Die TF-Karte ist herausnehmbar. Das Wesentliche an den Roboterarmen der PI-Version ist eine Entwicklungsplatine mit einem unabhängigen System, das als Miniatur-Computerhost angesehen werden kann.
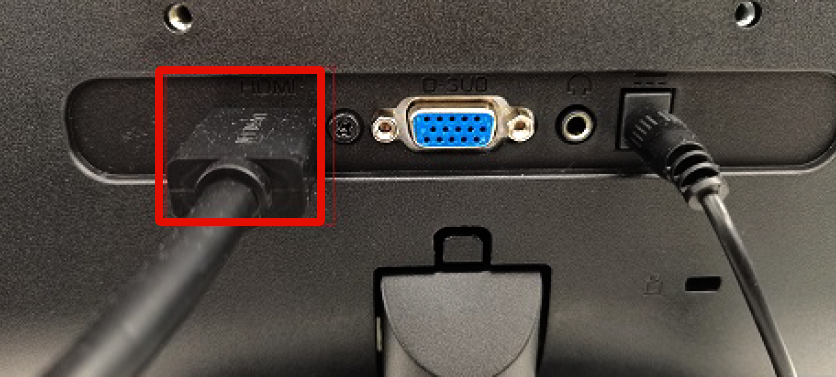
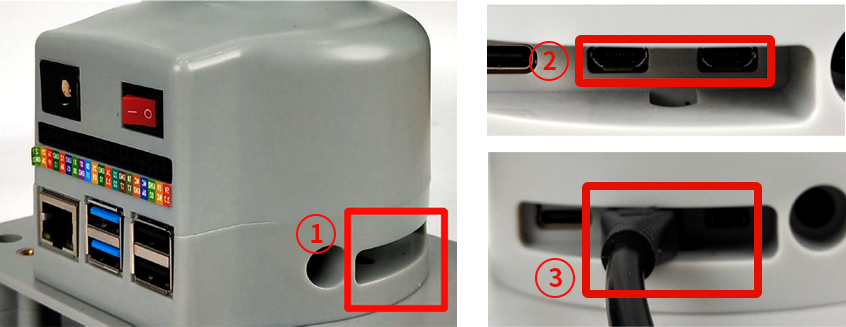
Die Kommunikation zwischen Host und Host kann nicht einfach über ein Kabel erfolgen. Sie kann nur an einen unabhängigen Monitor angeschlossen und mit Stromversorgung, Maus und Tastatur ausgestattet werden. Nach dem Zugriff auf das integrierte System der Entwicklungsplatine kann sie entwickelt und betrieben werden.