ChatGPT for Robotics: Design Principles and Model Abilities
Microsoft Autonomous Systems and Robotics Research Group members are introducing a new paradigm for robotics based on language powered by ChatGPT. The recent paper “ChatGPT for Robotics” describes a series of design principles that can be used to guide ChatGPT toward solving robotics tasks.
They extended the capabilities of ChatGPT to robotics, and controlled multiple platforms such as myCobot 280 robot arms, drones, and home assistant robots intuitively with language.
ChatGPT - Robot Manipulation
In the video, they outline the results of using ChatGPT for robot manipulation tasks. They define a high-level function library for manipulation containing basic functions such as moving to a target position, activating/deactivating a gripper, etc.
With sufficient context in the prompt and access to these functions, they find ChatGPT to be quickly able to perform tasks such as pick-and-place, stacking, block arrangement, etc.
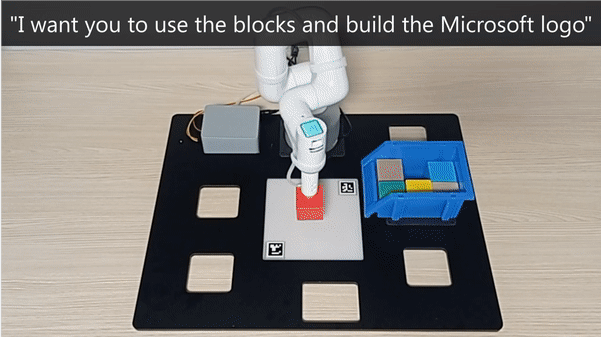
Next, they ask ChatGPT to use the skills it has learned so far to execute a more complex task of block arrangement.
This highlights the ability of ChatGPT to construct higher-level behavioral primitives composed of simpler functions and to chain these learned skills together logically to solve more intricate problems.