{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Lifetime Customer Support
Always at support@elephantrobotics.com.










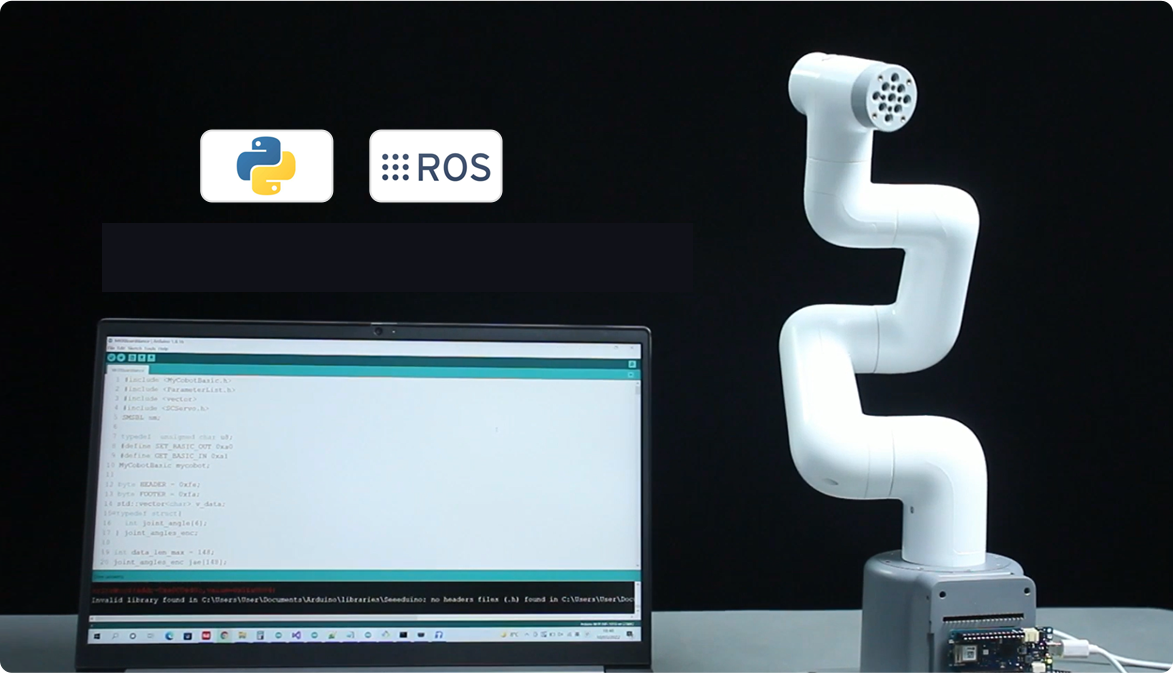
myCobot 280 for Arduino is a one of sub products in myCobot 280 robotic arm series. Brained on M5STACK-ATOM ESP32, myCobot 280 for Arduino supports various development boards such as ARDUINO MKR WIFI1010, MEGA2560, UNO and so on. Besides, there is a one-stop platform called myStudio where you flash the firmware to the latest version, making secondary developments easy and swift.

Inserted with MKRWIFI1010 \ MEGA2560 board, myCobot 280 for Arduino supports python2 / 3 driver library, ROS development, RVIZ simulation and MOVEIT interface development after flashing official firmwares. It can control the robot arm effectively and verify the algorithm virtually, which swipes out the barriers for the experimental environment and improves the experimenting efficiency.
 CREATIVE DEVELOPMENT
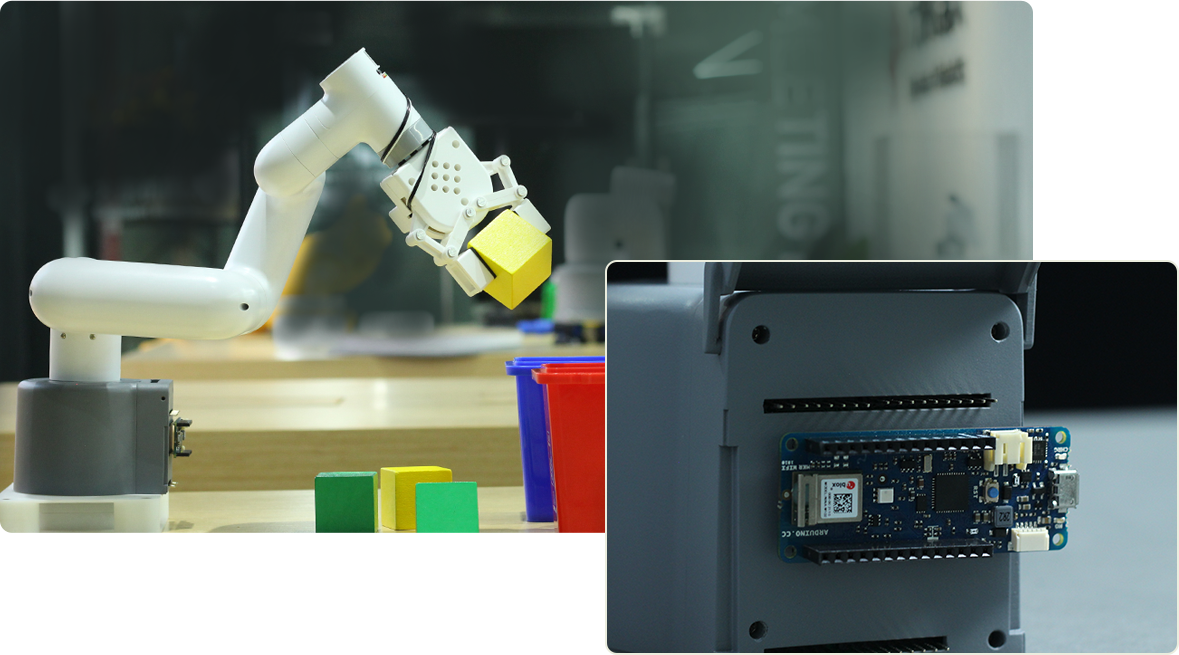
CREATIVE DEVELOPMENTEquipped with Arduino hardware interfaces, dozens of end effectors, and LEGO interfaces at the end, myCobot 280 for Arduino is able to connect various sensors to realize color recognition and tracking, QR code & gesture recognition, voice broadcasting, etc., so that you can build a perfect programming environment for ER myCobot 280 for Arduino from scratch.
 PARAMETERS
PARAMETERS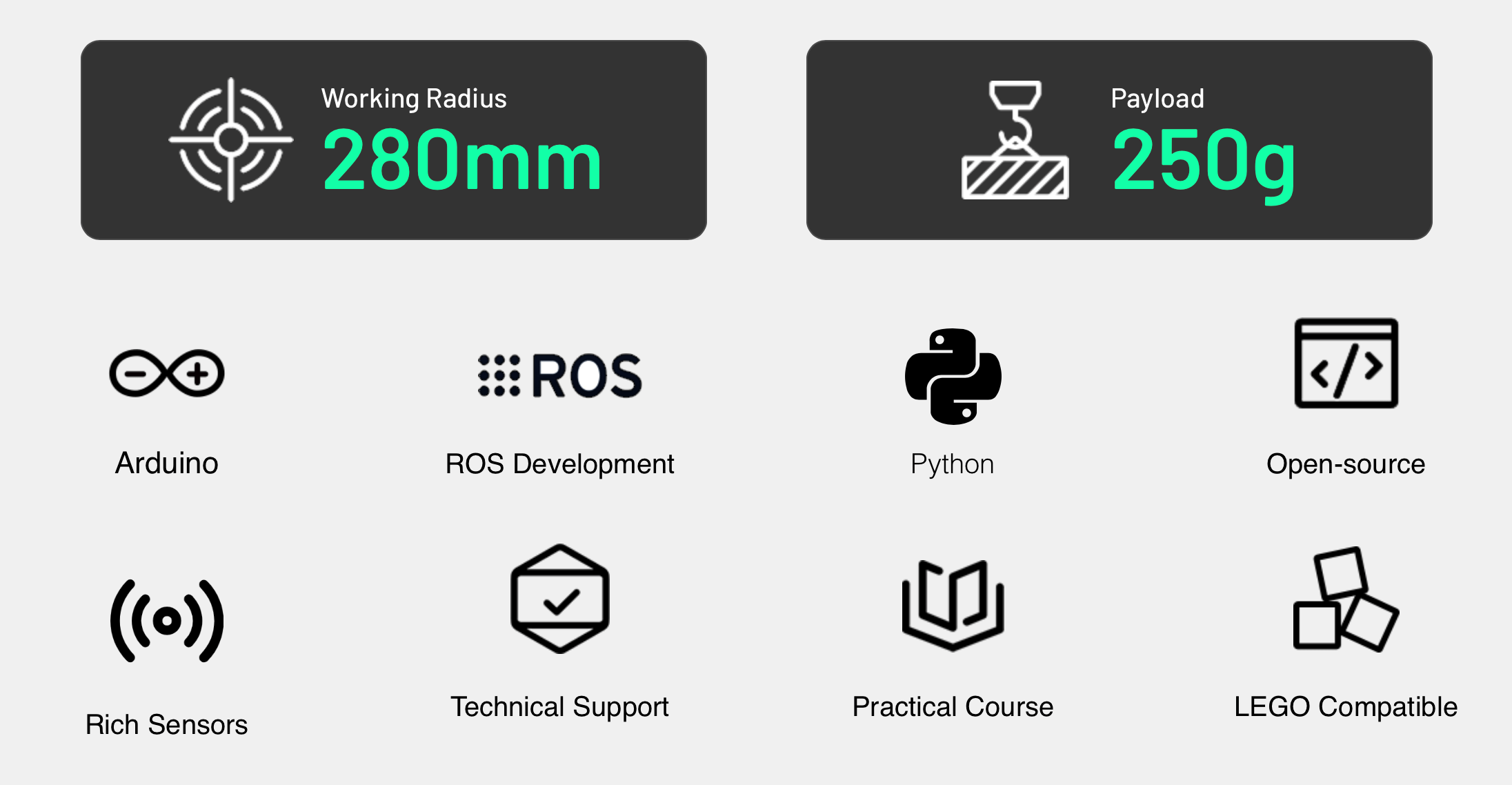
Solid configurations completes your embedded development demands, key interaction, screen display, buzzer, IO interface,
whatever you think can be developed.

Arduino is an open-source electronic prototype platform with flexible, hands-on hardware and software. The system is designed for designers, craftsmen, hobbies, and people interested in developing interactive devices or interactive development.

We support the Arduino system by default, and provides product corresponding drive library files. If you want to program by the mainstream programming platform such as Python or MyBlockly and ROS, you’re supposed to flash official firmwares or develop firmwares by yourself.
myCobot280 series robotic arm can be equipped with a variety of end effectors, such as adaptive gripper, camera flange, suction pump, mobile phone holder etc., which can quickly build the application scene of manipulator.
If your development board supports dual serial port, by flashing official firmware and installing the ROS, it’s able to simplify the complex motion control of 6 degree of freedom movements via Ubuntu18.04 system.
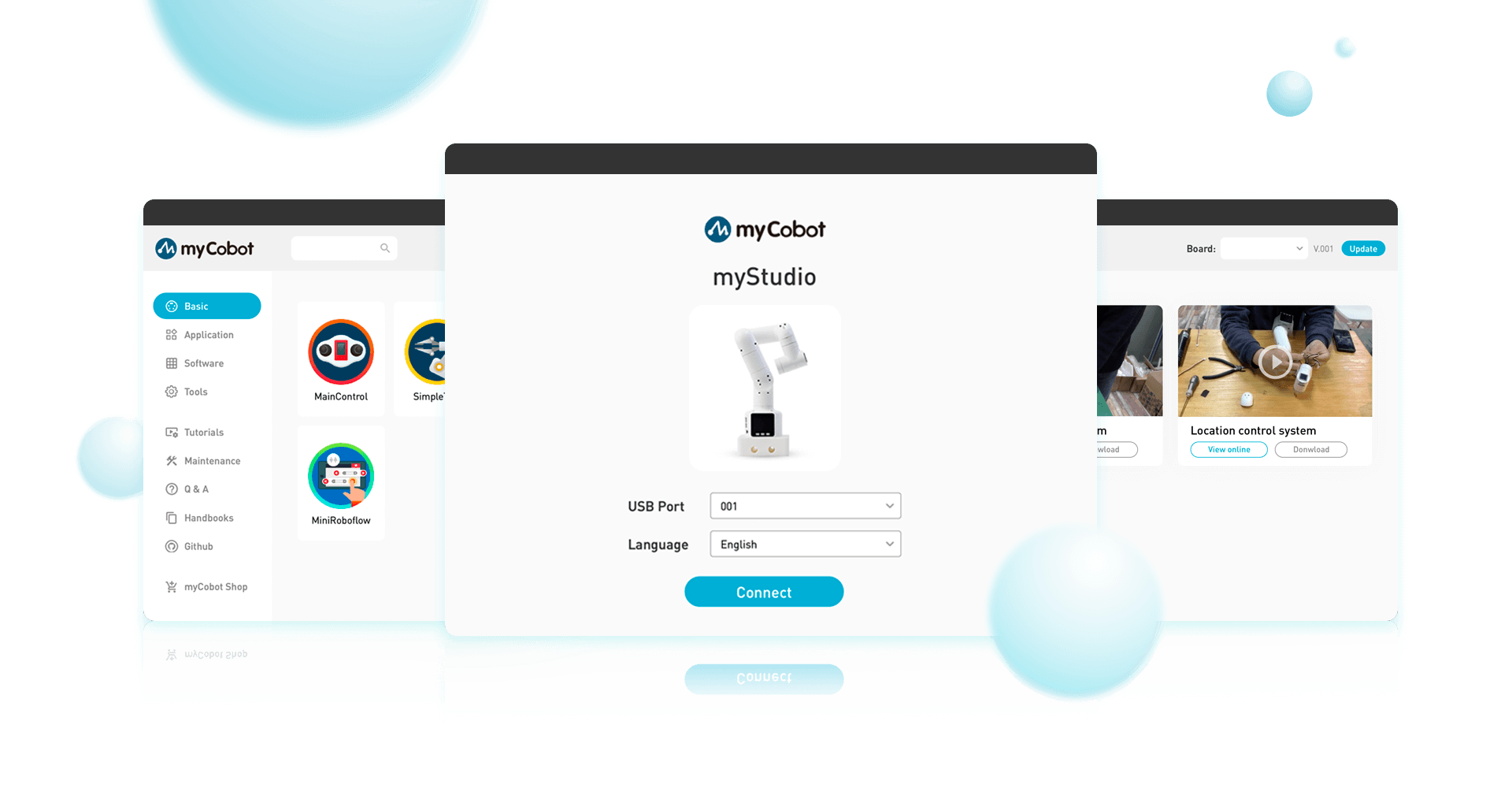 myStudio
myStudiomyStudio is a one-stop platform for robot arms of myRobot/myCobot. The main functions of myStudio are:

We ship worldwide using the following carriers: DHL, FedEx, UPS, USPS, YunExpress.






Taxes may apply to imported goods/services and are regulated by the country's law. Elephant Robotics Shop is not responsible for any tax invoice charged on its products. Different policies and tax rates are applied per country.
You may be eligible to reclaim import taxes and duties. However, this requires a personal application to your local government or authority and we are unable to support this process.
![]()
It typically takes 7-15 business days to process your order.
This timeframe accounts for order verification, quality control measures, and packaging.
If the payment is delayed, the processing time will be lengthened.
We typically ship on Thursdays.
The products shall be delivered by International Express within 15 working days.
The shipping method and time vary according to different products and different countries.
In case you order a number of products, it may happen that your order arrives in several deliveries. This also applies to products that have to be pre-ordered. However, we will only charge you one shipping fee.
Please make sure to enter your shipping information in English to avoid possible delays or failure in international logistics. Shipping costs will be automatically billed at checkout based on your shipping address.
Example:
Name: Shenzhen Elephant Robotics Technology Co., Ltd.
Address: Room D5F05, Blackmark International Smart Hardware Innovation Center
City: Shenzhen
State: Guangdong
Zip Code: 518035
Phone: +86(0755)-8696-8565
Email: info@elephantrobotics.com
The shipping cost of different products in different countries varies.
Please refer to the shipping cost shown in the payment for the order or check Shipping Policy.
After your order is successfully placed, you will receive an Order Confirmation email to confirm your order details.
Once your item ships, you will receive a Shipment Notification email, which includes your order number, express information, and package tracking number, and you are also able to track the status of your order through the email.
Things about order modification, refund processing, shipping updating, and so on will be notified to you in real-time by email as well.
Note:
Returns: You have 7 days from receiving your order to return unopened items. You'll be responsible for any return shipping costs or other risks.
Warranty: If your product malfunctions during normal use within the warranty period, we'll repair it for free. For more details on the warranty, please check the WARRANTY & RETURN.
| Product Features | myCobot 2023 Support | myCobot 2020 Support |
Kinematics Algorithm Update | LST | LST |
Gitbook | LST | LST |
GamePads Control | LST | LST |
App Control | LST | LST |
myStudio | LST | LST |
myBlock | LST | LST |
ROS 1 | LST | LST |
ROS 2 | LST | LST |
System Firmware Upgrade | LST | 2023.09.30 Deadline |
Software Maintenance | LST | 2023.09.30 Deadline |
System Vulnerability Repair | LST | 2023.09.30 Deadline |
You can consider myCobot 280 2023 All-in-one Suite. This kit has been chosen by hundreds of labs.
myCobot 280 M5Stack version user manual for installation and operation.
myCobot 280 Arduino version user manual for installation and operation.
myCobot 280 Raspberry Pi version user manual for installation and operation.
myCobot 280 Jetson Nano version user manual for installation and operation.
Please email to (support@elephantrobotics.com), and provide the order number, it is best to provide some pictures or videos, so as to facilitate your service faster.
The myCobot 280 source code can be found on GitHub, and you can download and modify it as needed.
myCobot 280 joint maximum speed 150°/s.
Maximum working lifespan: 500 hours (The robot will run relevant programs after it is turned on, so it is calculated from the time it is turned on)
We provide the myCobot 280 CAD model in the gitbook manual, you can download it to plan the configuration in advance.
We provide the myCobot 280 URDF file on github, you can also find it here.
The myCobot 280 compatible with both LEGO parts installation and M4 screw installation, allowing for versatile installation. Arm end mounting components also work with LEGO component holes and screw threaded holes.
Please email to (info@elephantrobotics.com), provide product list and complete delivery address.
Once your item is shipped, you'll receive a notification email with your order number, courier information, and tracking number. This email will be sent to the email provided during checkout.
Returns: You have 7 days from receiving your order to return unopened items. You'll be responsible for any return shipping costs or other risks.
Warranty: If your product malfunctions during normal use within the warranty period, we'll repair it for free. For more details on the warranty, please check the WARRANTY & RETURN.
It typically takes 7-15 business days to process your order after payment before it ships out. This timeframe accounts for order verification, quality control measures, and packaging. For more details on the shipping, please check the Shipping Method&Time.
Once your order is shipped, you can expect to receive it within 1-2 weeks via international express delivery.
When the load > 500g, the speed should be lower than 50%.
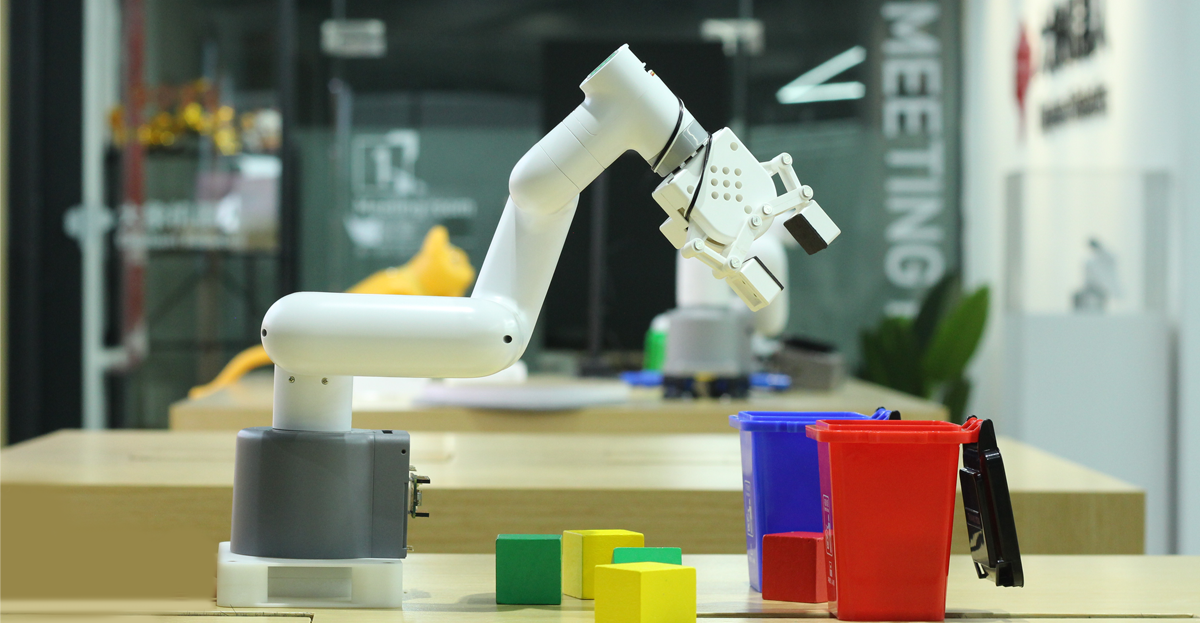
The myCobot 280 can be used for a variety of tasks such as object engraving, drawing, writing, pick and place operations, and more.
Accessories available for the myCobot 280 include the Adaptive Gripper, G-Shape Base, Flat Base, Camera Flange, Suction Pump, Flexible Gripper, Parallel Gripper, Phone Holder, Pen Holder, Gamepad, Dual-Vacuum Gripper, myCobot Cylinder, Ai Kit, and Mobile Base.
