{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
){kind=link}
Lifetime Customer Support
Always at support@elephantrobotics.com.










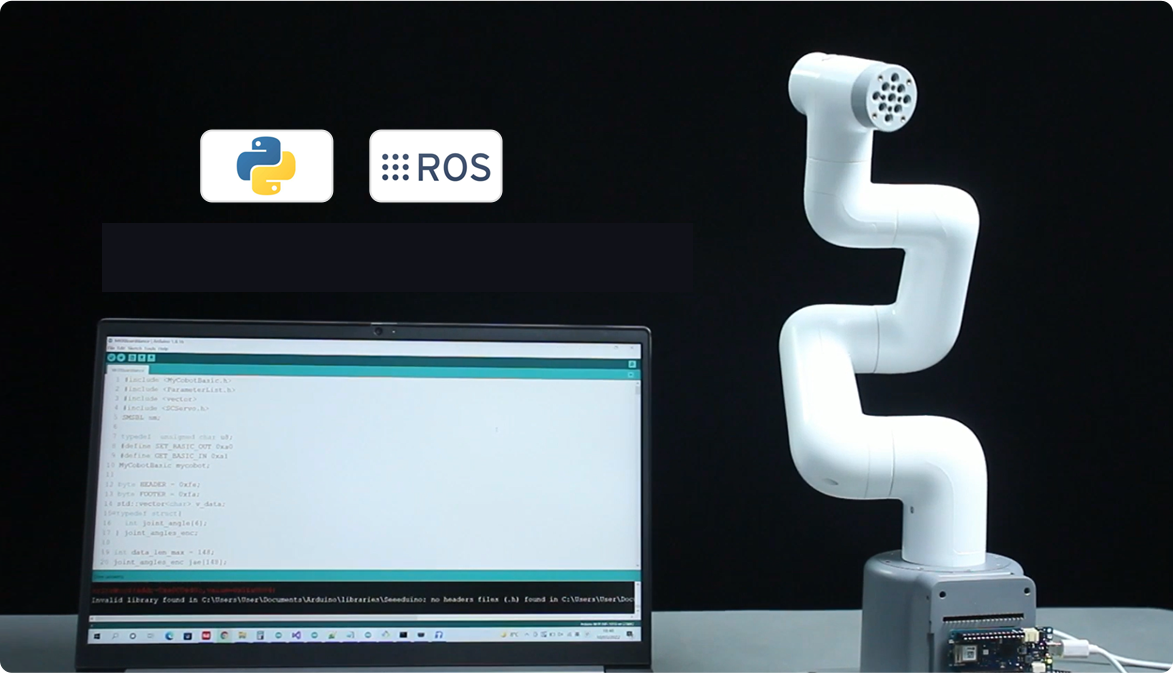
myCobot 280 for Arduino is a one of sub products in myCobot 280 robotic arm series. Brained on M5STACK-ATOM ESP32, myCobot 280 for Arduino supports various development boards such as ARDUINO MKR WIFI1010, MEGA2560, UNO and so on. Besides, there is a one-stop platform called myStudio where you flash the firmware to the latest version, making secondary developments easy and swift.

Inserted with MKRWIFI1010 \ MEGA2560 board, myCobot 280 for Arduino supports python2 / 3 driver library, ROS development, RVIZ simulation and MOVEIT interface development after flashing official firmwares. It can control the robot arm effectively and verify the algorithm virtually, which swipes out the barriers for the experimental environment and improves the experimenting efficiency.
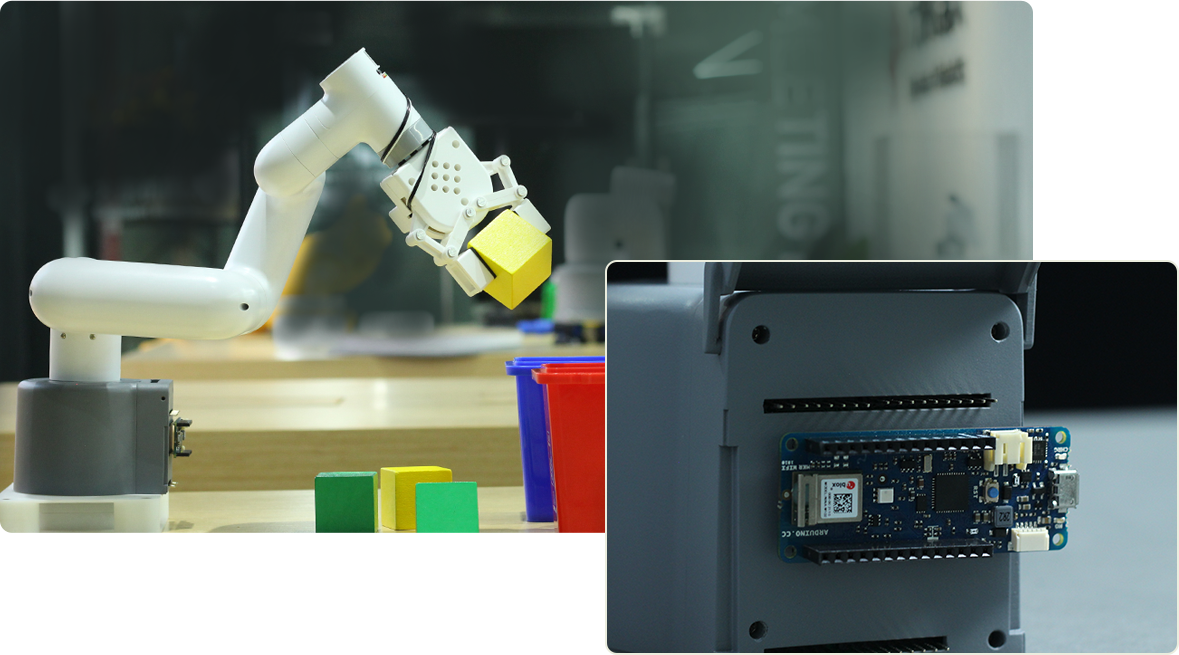
Equipped with Arduino hardware interfaces, dozens of end effectors, and LEGO interfaces at the end, myCobot 280 for Arduino is able to connect various sensors to realize color recognition and tracking, QR code & gesture recognition, voice broadcasting, etc., so that you can build a perfect programming environment for ER myCobot 280 for Arduino from scratch.
Solid configurations completes your embedded development demands, key interaction, screen display, buzzer, IO interface,
whatever you think can be developed.

Arduino is an open-source electronic prototype platform with flexible, hands-on hardware and software. The system is designed for designers, craftsmen, hobbies, and people interested in developing interactive devices or interactive development.

We support the Arduino system by default, and provides product corresponding drive library files. If you want to program by the mainstream programming platform such as Python or MyBlockly and ROS, you’re supposed to flash official firmwares or develop firmwares by yourself.
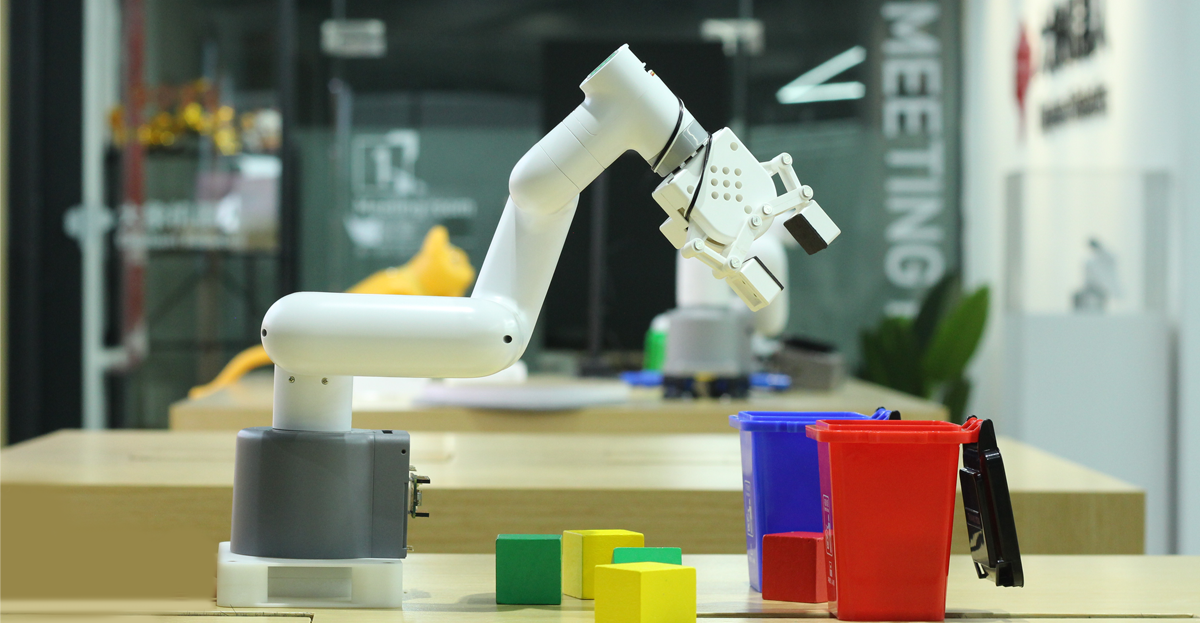
myCobot280 series robotic arm can be equipped with a variety of end effectors, such as adaptive gripper, camera flange, suction pump, mobile phone holder etc., which can quickly build the application scene of manipulator.
If your development board supports dual serial port, by flashing official firmware and installing the ROS, it’s able to simplify the complex motion control of 6 degree of freedom movements via Ubuntu18.04 system.
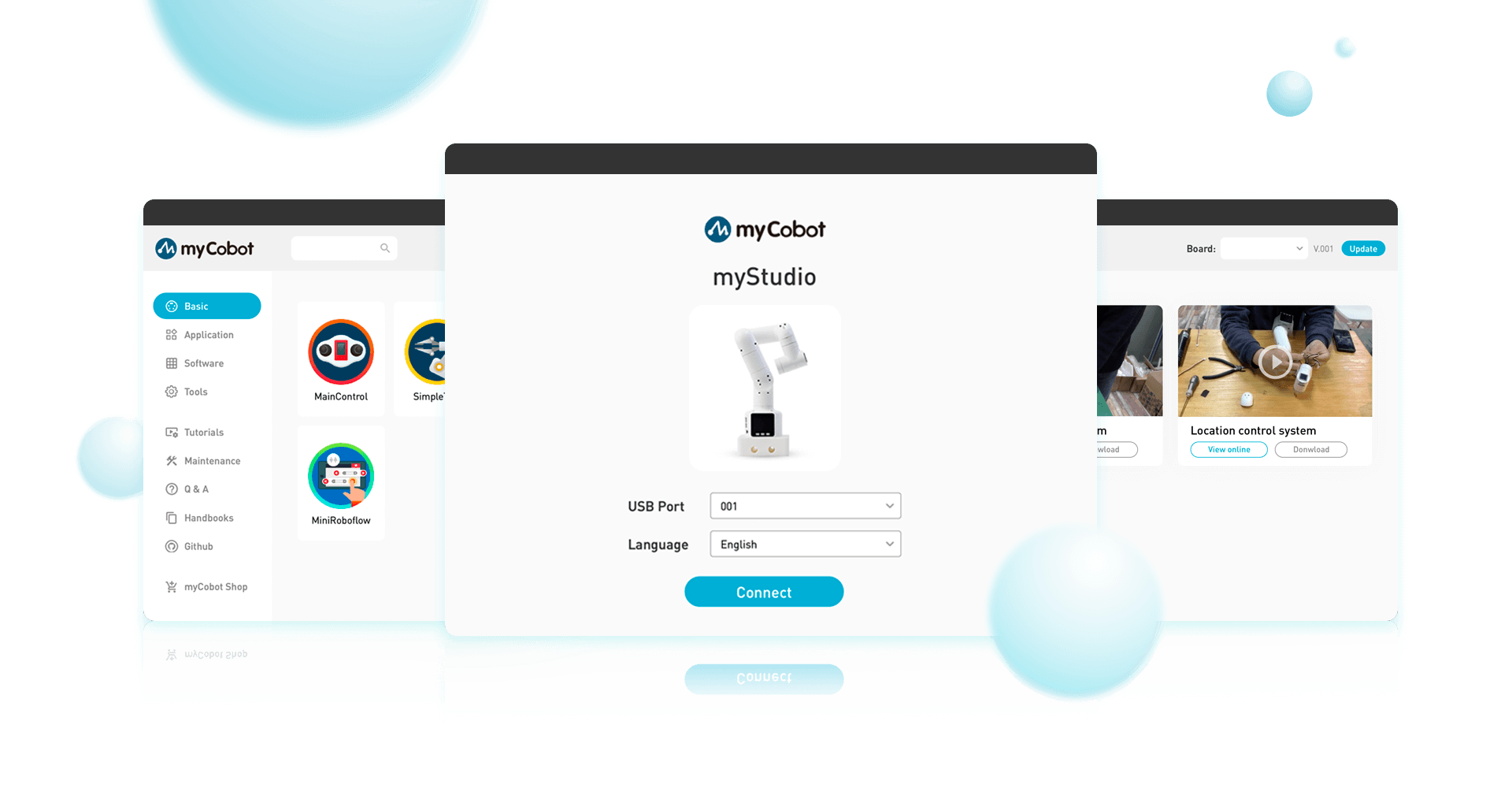
myStudio is a one-stop platform for robot arms of myRobot/myCobot. The main functions of myStudio are:

We ship worldwide using the following carriers: DHL, FedEx, UPS, USPS, YunExpress.






Taxes may apply to imported goods/services and are regulated by the country's law. Elephant Robotics Shop is not responsible for any tax invoice charged on its products. Different policies and tax rates are applied per country.
You may be eligible to reclaim import taxes and duties. However, this requires a personal application to your local government or authority and we are unable to support this process.
![]()
It typically takes 7-15 business days to process your order.
This timeframe accounts for order verification, quality control measures, and packaging.
If the payment is delayed, the processing time will be lengthened.
We typically ship on Thursdays.
The products shall be delivered by International Express within 15 working days.
The shipping method and time vary according to different products and different countries.
In case you order a number of products, it may happen that your order arrives in several deliveries. This also applies to products that have to be pre-ordered. However, we will only charge you one shipping fee.
Please make sure to enter your shipping information in English to avoid possible delays or failure in international logistics. Shipping costs will be automatically billed at checkout based on your shipping address.
Example:
Name: Shenzhen Elephant Robotics Technology Co., Ltd.
Address: Room D5F05, Blackmark International Smart Hardware Innovation Center
City: Shenzhen
State: Guangdong
Zip Code: 518035
Phone: +86(0755)-8696-8565
Email: info@elephantrobotics.com
Free shipping on orders over $3000.
Use the Code: FREESHIP3000 when you checkout.
The shipping cost of different products in different countries varies.
Please refer to the shipping cost shown in the payment for the order or check Shipping Policy.
After your order is successfully placed, you will receive an Order Confirmation email to confirm your order details.
Once your item ships, you will receive a Shipment Notification email, which includes your order number, express information, and package tracking number, and you are also able to track the status of your order through the email.
Things about order modification, refund processing, shipping updating, and so on will be notified to you in real-time by email as well.
Note:
Returns: You have 7 days from receiving your order to return unopened items. You'll be responsible for any return shipping costs or other risks.
Warranty: If your product malfunctions during normal use within the warranty period, we'll repair it for free. For more details on the warranty, please check the WARRANTY & RETURN.
Difference
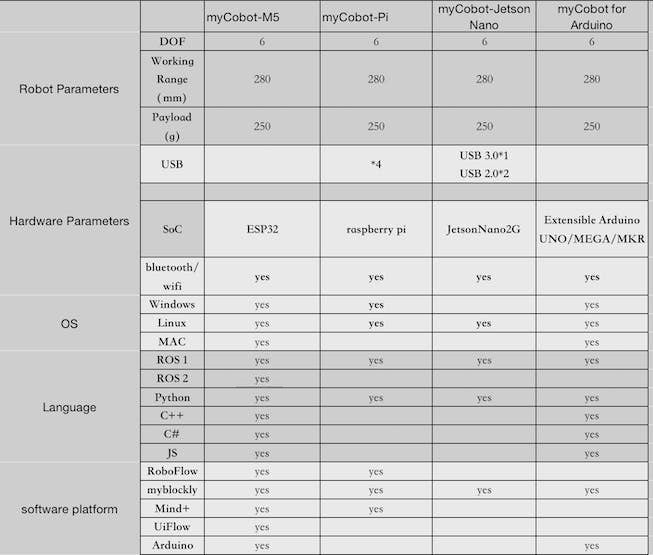
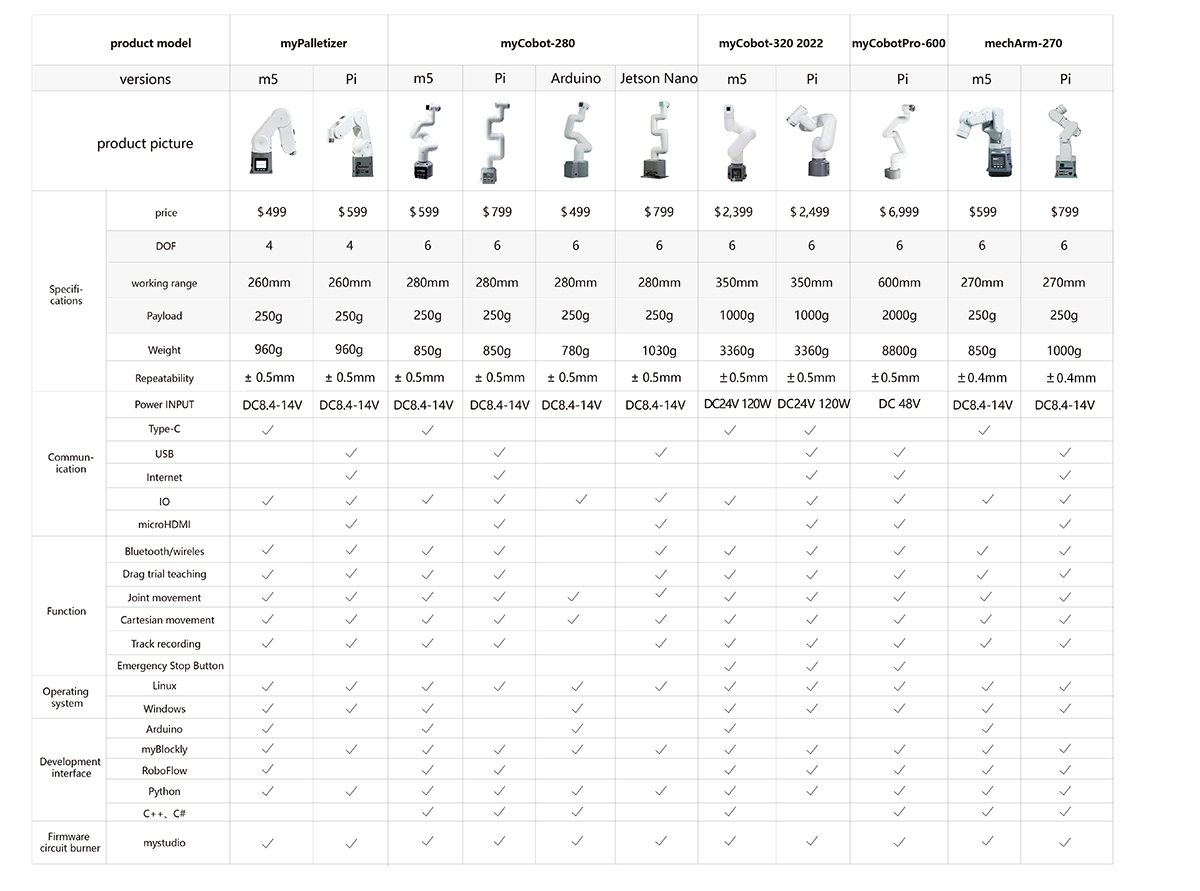
What are the differences between myCobot-M5, myCobot-Pi, myCobot-Jetson Nano, and myCobot for Arduino?
A robotic arm is a type of mechanical arm. It is usually programmable and assembles functions of a human arm. Such anarm is typically connected by joints that allow rotation or translational displacement.
Robotic arms are irreplaceable devices capable of performing a specific task or job quickly, efficiently, and with extreme accuracy in the modern production process. The earliest research on robotic arms dates back to the 1940s when US Argonne and Oak Ridge National Laboratories used remote robotic arms to deal with radioactive materials. After seventy year's development, robotic arms become one of the most common mechanical devices used in cutting, assembling, palletizing, spraying, and other occasions, and in medical surgery, aerospace exploration, military reconnaissance, etc.
myCobot-M5introduced by the year 2020 with M5 Stack Atom & Basic ESP32 with dual display screens, supporting the faster visual operation and monitoring work status, so programming MyCobot-M5 is simple and easy for every user. Based on M5 Stack Atom & Basic ESP32 providing a full range of IoT modules from main controllers, communication modules to the sensors and actuators, Mycobot-M5 is suited for users emphasizing high performance, reliability, and scalability. Practical cases range from studio helpers that can deliver tools to kitchen assistants that can cookcakes. On M5 Stack open platform, users can browse and search for open source hardware, API interface and diverse cooperation forms in a more cost-effective way.

myCobot-Piintroduced with Raspberry Pi 4B with 1.5GHz 4 core CPU, running on Debian/Ubuntu platform. Built-in ROS and blockly visual programming enable Mycobot-Pi to operate with relatively high scalability. It is regarded as the most affordable portable processor. As Raspberry Pi aims to promote basic computer science education in schools with low-cost hardware and free software, users can enjoy a friendly educational community with the help of the Raspberry Pi press and Raspberry Pi foundation. With numerous books for computing gaming and the inspirational community in an easy-to-use platform of Raspberry Pi, this version is suitable for users ranging from beginners who want to learn python or set up a lightweight platform, to STEM educators and institutions for further research.

myCobot-Jetson NanoBased on the Jetson Nano AI board and equipped with a camera, myCobot 280 Jetson Nano is capable of quick image processing, robotic algorithm developments, ROS simulation learning, etc. Being a powerful small artificial intelligence computer, it can be started by simply inserting a microSD card with a system image, which simplifies beginners' development. Besides, the Jetson Nano board includes a higher-performance and more powerful GPU (graphics processing unit), which leads to better outcomes in eye-in-hand robot projects compared with my robot Pi making more advanced R&Dpossible. Combined with Nvidia's powerful SDKs such as Deepstream, Vision AI applications and services, it is an ideal version to deepen AI and robotics learning for developers. This boosts the potential of the myCobot-Jetson Nano's secondary development.

l myCobot for ArduinoCompatible with multiple Arduino or Arduino-like boards and extensions. Arduino software is easy-to-use for beginners, yet flexible enough for advanced users. While most other microcontrollers systems are limited to Windows, the Arduino Software (IDE) runs on cross platforms including Windows, Macintosh OSX, and Linux OS. This version focuses on the integrity of robotic arms and pays more attention to improving the simplicity of research and development of users. With a range of Arduino boards (e.g. MKR WiFi 1010, UNO, Mega 2560, etc ) and extensible software to choose from, developers and designers can make their unique myCobot to meet their demands. As myCobot for Arduino provides a more open clear development environment, developers can even design their boards without necessarily relying on PCB'A (Printed Circuit Board Assembly). Furthermore, for teachers looking to bring some innovation into classrooms, Arduino Education is ready to empower educators with necessary hardware and software tools.

For More:https://shop.elephantrobotics.com/blogs/news/which-mycobot-is-suited-for-you
MORE CHOICES
A1: Of course. You can use our API (Python、C++、C#、Javascript) to control myCobot directly or remotely or dive directly into the ROS code, which is open-source.
A2:
With myCobot M5 , you can learn that
Hardware: Embedded Microcontroller Based on ESP32, Motor and Steering Gear, M5Stack Basic/ Atom;
Software: Arduino, UiFlow, Myblockly, Mind+, RoboFlow, C#, C++, Python, Javascript, ROS,MoveIt, Communication Data, Virtual Machines & Linux (visual system).
With myCobot Pi and myArm, you can learn that
Hardware: microprocessor, motor and steering gear;
Software: Myblockly, Mind+, RoboFlow, C#, C++, Python, Javascript, ROS, MoveIt.
A4:
myArm 300 PI 2023:The payload is 200g, and the working range is 300mm.
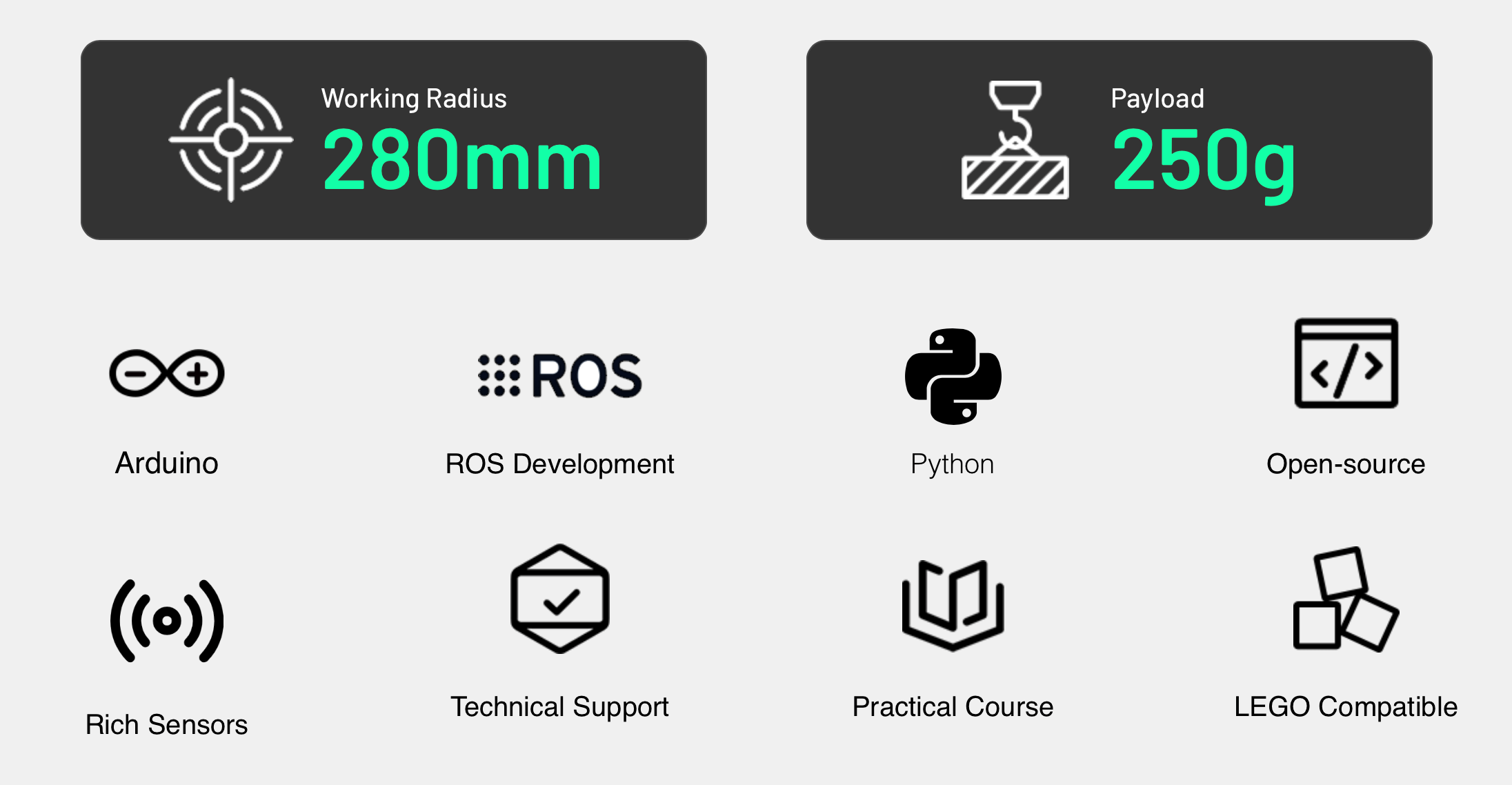
myCobot 280: The net weight of myCobot is 850g, the payload is 250g, and the working range is 280mm.
myCobot 320:The net weight of myCobot is 3.5kg, the payload is 1kg, and the working range is 320mm.
myCobot 260:The net weight of myPalletizer is 960g, the payload is 300g, and the working range is 260mm.
myCobot Pro 600:The net weight of myCobot Pro is 8.8kg, the payload is 2kg, and the working range is 600mm.
A5: We provide customers with return and warranty services.Return service is limited to goods not opened within 7 days after the receipt date of logistics of the products. The freight or other risks incurred in return shall be borne by the customer.During the warranty period of the delivered product, the company only repairs the malfunctions that occur during the normal use of the robot for free. For more warranty content, please check out on the product details page.
A6: We ship worldwide and we use the following carriers: FedEx、UPS 、DHL. The products shall be delivered by International Express within 1-2 weeks. All products use standard cartons and special customized super hard paper shells to firmly fix the products and prevent damage from impact.
A7: For non-technical players, myCobot and myArm supports drag teaching function, which allows you to teach it every action and instruction you want. Get rid of the traditional path point storage mode, no programming is required. The saved path can be recorded, and different paths can be saved as long as 60mins at most.
A8: The repeated positioning accuracy of myArm 300 is ±0.5mm.
The positioning of the two products is not the same. The ER 280 robotic arm is a consumer type and is mostly used in the education field. It is recommended to use 1-2 hours to rest for 15-30 minutes. The repeat positioning accuracy can reach ±0.2mm in a short time.The ER 320 is suitable for commercial work within 12 hours, with a repeat positioning accuracy of ±0.3mm. If used in a short time, the repeat positioning accuracy can also reach ±0.2mm.
A9: The robotic arm does not have a camera. But we have machine vision-related kits now available for vision development.
A10:
Our Product Introduction and User Manual Link is https://www.elephantrobotics.com/myCobot/
Github-development Link ( software tutorial ) is https://github.com/elephantrobotics/myCobot/
Gitbook ( Web Version Detailed Tutorial ) is https://www.elephantrobotics.com/docs/myCobot/
